Overview¶
The code in this notebook is adapted from: Brunton, S. L., & Kutz, J. N. (2022). Data-Driven Science and Engineering: Machine Learning, Dynamical Systems, and Control. Cambridge University Press.
Imports¶
import matplotlib.pyplot as plt
import numpy as np
import seaborn as snsGenerate data¶
sns.set_theme(style="whitegrid", context="notebook", font_scale=1.2)
rng = np.random.default_rng(7)
center = np.array([2.0, 1.0])
scales = np.array([2.0, 0.6])
angle = np.pi / 4
rotation = np.array(
[[np.cos(angle), -np.sin(angle)],
[np.sin(angle), np.cos(angle)]]
)
n_samples = 10_000
cloud = rotation @ np.diag(scales) @ rng.standard_normal((2, n_samples)) + center[:, None]
plt.figure(figsize=(5, 5))
plt.plot(cloud[0], cloud[1], "o", markersize=2, alpha=0.5, color='k')
plt.plot(center[0], center[1], "o", color="red", markersize=3, label="Center")
plt.legend()
plt.axis("equal")
plt.title("2D Gaussian Cloud");
Analysis¶
Remove mean:
mean = cloud.mean(axis=1, keepdims=True)
detrended_cloud = cloud - meanConstruct covariance matrices
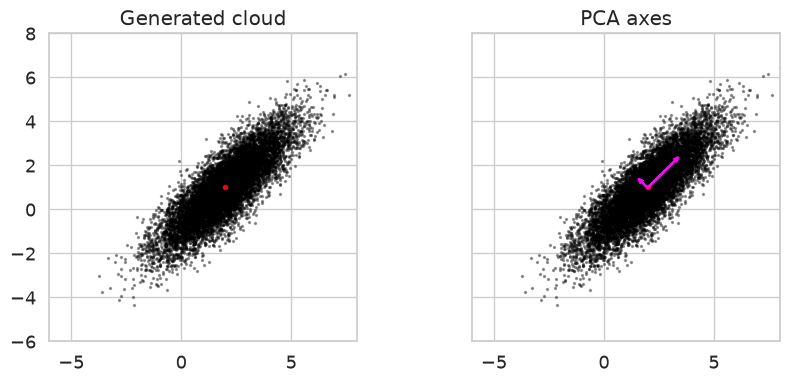
cov_matrix_1 = (detrended_cloud @ detrended_cloud.T) / n_samples
cov_matrix_2 = (detrended_cloud.T @ detrended_cloud) / n_samples
print("Covariance matrix 1 shape:", cov_matrix_1.shape)
print("Covariance matrix 2 shape:", cov_matrix_2.shape)Covariance matrix 1 shape: (2, 2)
Covariance matrix 2 shape: (10000, 10000)
Since matrix 1 is much smaller, we will find its eigenvalues.
eigen_val, eigen_vect = np.linalg.eig(cov_matrix_1)eigen_valarray([3.95439111, 0.35316582])Visualize results¶
eigen_vectarray([[ 0.70990989, -0.70429252],
[ 0.70429252, 0.70990989]])fig, (ax_left, ax_right) = plt.subplots(1, 2, figsize=(10, 4),
sharex=True, sharey=True)
ax_left.scatter(cloud[0], cloud[1], s=2, c="black", alpha=0.35)
ax_left.set_title("Generated cloud")
ax_right.scatter(cloud[0], cloud[1], s=2, c="black", alpha=0.35)
ax_right.set_title("PCA axes")
for direction, length in zip(eigen_vect.T, eigen_val):
endpoint = mean[:, 0] + direction * np.sqrt(length)
ax_right.arrow(
mean[0, 0],
mean[1, 0],
endpoint[0] - mean[0, 0],
endpoint[1] - mean[1, 0],
color="magenta",
linewidth=1.5,
length_includes_head=True,
head_width=0.15,
head_length=0.2,
zorder=5
)
for ax in (ax_left, ax_right):
ax.plot(center[0], center[1], "o", color="red", markersize=3, label="Center")
ax.set_aspect("equal")
ax.set_xlim(-6, 8)
ax.set_ylim(-6, 8)
Resources and references¶
TBD